Squiggles : a quadruped with attitude
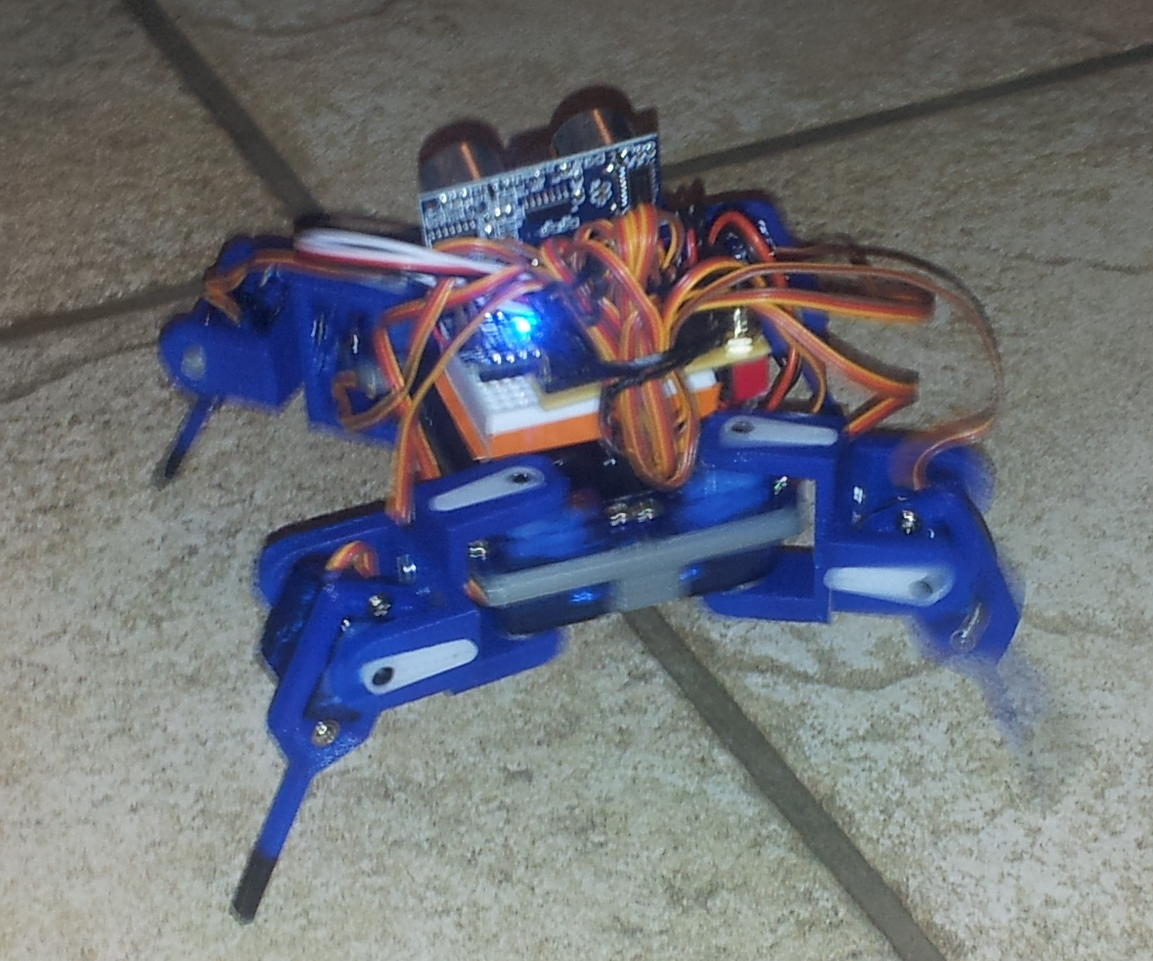
Philip brought along his 3D printed Mini Quadroped (http://www.thingiverse.com/thing:38159) to H4H on Tuesday – it runs on 4x 1.2V NiMH batteries and can autonomously roam the room using ultra-sonic range sensors to avoid collisions. It uses eight servos controlled by an Arduino Nano, so each leg has two axes of movement (2-DoF)!
Ok, so I had to look it up: “Quadrupedalism is a form of terrestrial locomotion in animals using four limbs or legs.”
Anyway, so Marcus made a short video of this little guy doing his thing which you can see after the break….

Some more info can be found here:
Mailing List Post: https://groups.google.com/
Thingie: http://www.thingiverse.com/
IMadeOne: http://www.thingiverse.com/
With permission from Philip:
Sliced with slic3r and printed with Blue and Silver PLA at 190 degrees Celcius on my self build RepRap Printrbot. Layer height 0.2mm and 50% infill. I used Fitec FS-90 transparent blue 9g servos for muscles, HC-SR04 Ultrasonic Range Finder for eyes, Arduino Nano for his brain and a 3-cell Lithium Polymer battery through an ESC/BEC for juice. My Mini Quadruped with electronics weighs in at 275 grams. This was one of the most fun projects I have done recently. I am still training him more and enhancing the code. What I have got working good so far regarding movement is flatout, stand, standup, sleep, gym and wink/wave. Next would be walking and obstacle avoidance. Upgrades I’ll be working on will be infra-red remote control regarding movements and other shenanigans. This is an Uber Geek Gadget.
Awesome design by ThingiVerse user TheCaseB. Ablapo also proposed some very useful remixes.
Philip was however subsequently forced to re-engineer the code for forward walking, reverse, left turn and right turn. Primary reason was that the provided code did not work out of the box via thing:38159 . The original code is based on the great work for his Chopsticks Junior robot by Lutz Michaelis (http://letsmakerobots.com/
For now the code is available “as is” from : https://github.com/zerotilt/
The code will work if you install the servo’s in the picture and make 90 degrees (neutral) on each servo such that the Mini Quadruped sits flat with legs stretch out (as in the main photo in http://www.thingiverse.com/
And some more photos taken from Philip’s mailing list post:





Philip brought along his 3D printed Mini Quadroped (http://www.thingiverse.com/thing:38159) to H4H on Tuesday – it runs on 4x 1.2V NiMH batteries and can autonomously roam the room using ultra-sonic range sensors to avoid collisions. It uses eight servos controlled by an Arduino Nano, so each leg has two axes of movement (2-DoF)! Ok, so I…